The NaoCoopApp is an intelligent system designed for demonstrating the cooperation ability of Nao Robots in industrial environment.
Used technologies/patterns: c# .net 4.5, WPF, Ms Sql, Linq to Sql, MVVM, State Machine.
Full source code available on GitHub.
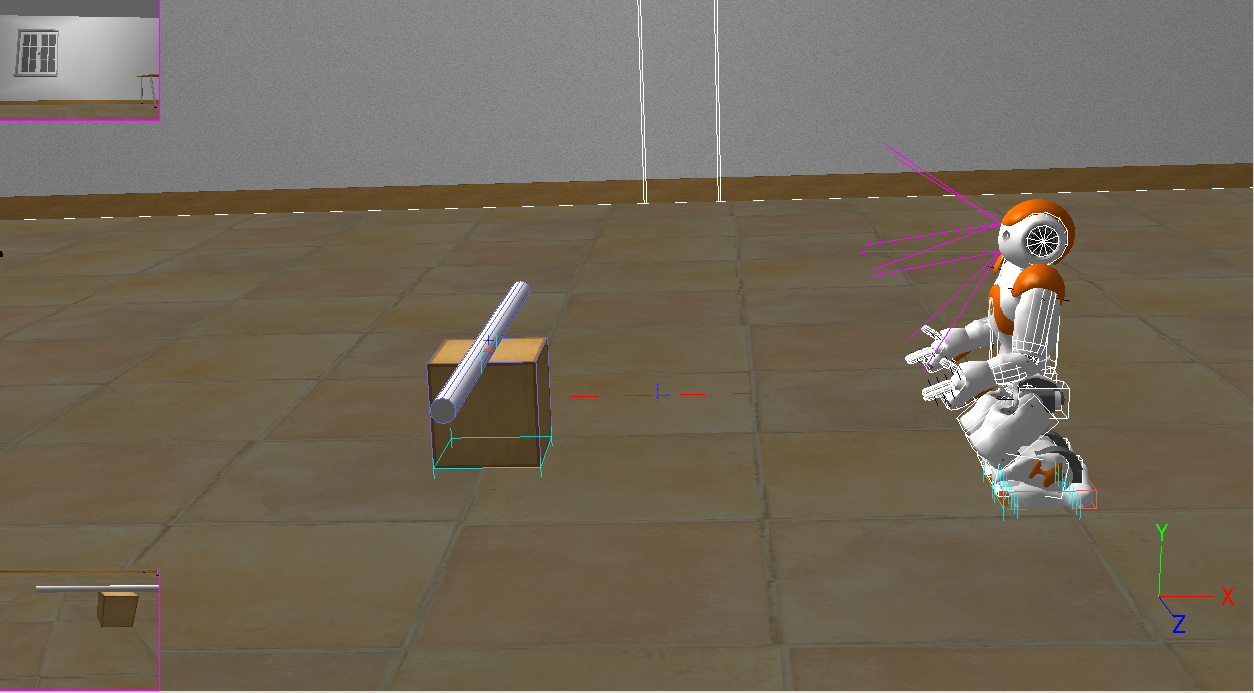
Webots: Simulating the operation
Nao Robots: Identifying and walking to the pick-up spot (marked by the NaoMark)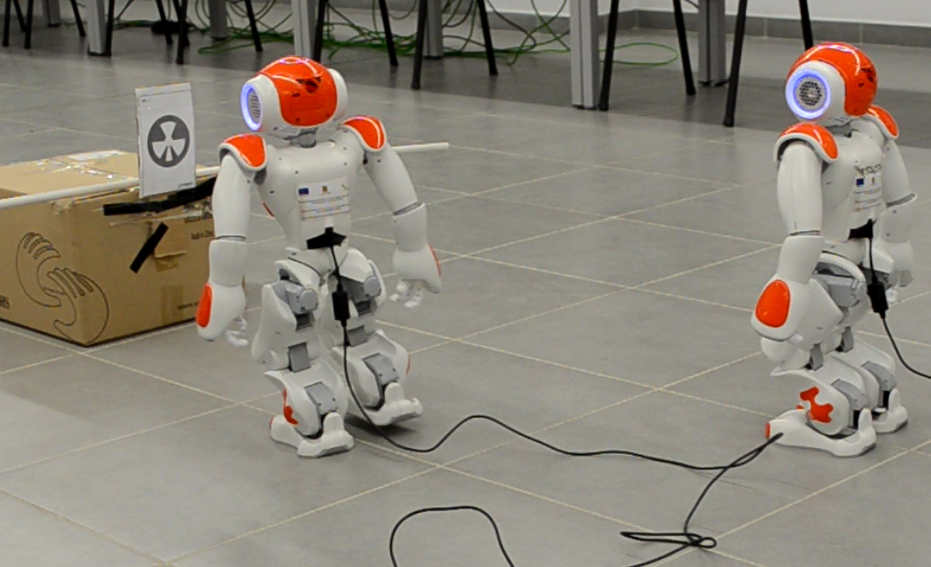
Nao Robots: Vocal synchronization before picking up the object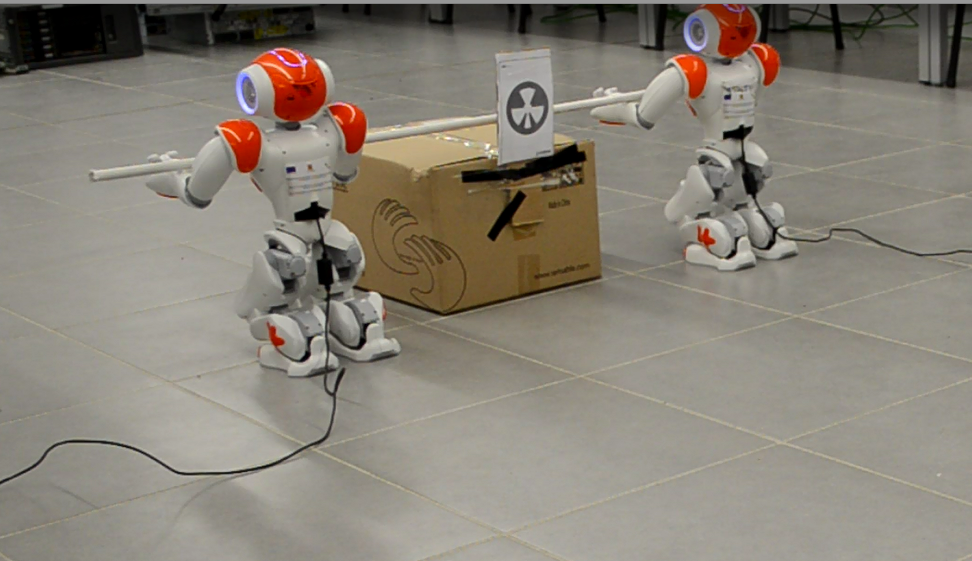
Nao Robots: Synchronized walking while carrying the object